








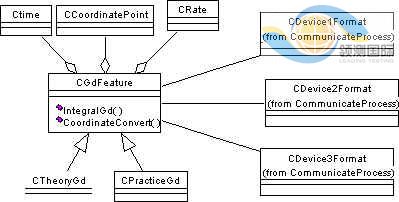
DataProcess РрАќЪЧ CTS РрАќжаЕФКЫаФВПЗжАќРЈСЫЪ§ОнДІРэЫљашЕФЫљгаРрЃЌетИіРрАќНЯИДдгетРяжЛИјГіВПЗжРрЭМЃЌШчЭМ 6 ЫљЪОЁЃ CGdFeature РрЪЧЪ§ОнДІРэВПЗжЕФРрЫќгаСНИізюжївЊЕФВйзїЃКЙьЕРЛ§ЗжКЭзјБъзЊЛЛЃЌ CTheoryGd ЃЈРэТлЙьЕРЃЉЃЌ CPracticeGd ЃЈЪЕМЪЙьЕРЃЉЃЌ CCoordinatePoint ЃЈЙьЕРзјБъЃЉЃЌ CRate ЃЈФПБъЫйЖШЃЉЁЃ
6 DataProcessРрАќжаЕФВПЗжРрМАЦфЙиЯЕЃЌCAbnormityРрАќАќКЌвьГЃДІРэвдМАВйзїЬЈгІМБДІРэЫљашвЊЕФРрЃЌРрЭМТдЁЃ 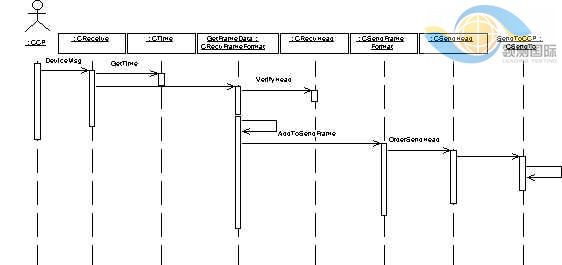
ЁЁ
2.3 ађСаЭМ
CTS ЕФЖЏЬЌЬиадгУађСаЭМБэЪОЃЌађСаЭМгУРДУшЪівЛИіШэМўЕФдЫзїЫГађЃЈГЁОАЃЉЃЌвЛИі Use Case АќКЌЖрИіШэМўЕФдЫзїГЁОАЁЃађСаЭМгУРДПЬЛ Use Case ЭМЃЌвЛИі Use Case ПЩвдгаЖрИіађСаЭМЃЌУПИіГЁОАгУвЛИіађСаЭМПЬЛЁЃКЯзїЭМгыађСаЭМЕШМлЃЌПЩвдгЩађСаЭМзЊЛЏЕУЕНЃЌСНепИїгагХШБЕуЁЃађСаЭМЖдгкЪЕЪБЯЕЭГЕФЪБМфвЊЧѓПЬЛЕФКмКУЃЌЕЋНсЙЙВЛУїЯдЃЛКЯзїЭМЕФЖдЯѓМфЙиЯЕУїЯдЕЋЫќгУЯћЯЂЫГађКХБэЪОЪБМфЃЌЪБМфБэЪОВЛЧхГўЃЌВЛЬЋЪЪгУгкЪЕЪБЯЕЭГЁЃ CommuniciateProcess ЕФађСаЭМШчЭМ 7 ЫљЪОЁЃ
 ЭМ 7 CommuniciateProcess ЕФађСаЭМ |
2.4 зДЬЌЭМ
CTS ЕФЖЏЬЌНсЙЙжївЊгУРДУшЪіЛюРрЕФЖЏЬЌЬиадЃЌЪЙгУ Rational Rose ЕФзДЬЌЭМ StateDiagram РДУшЪіЁЃааЮЊЕМжТСЫзДЬЌЕФЧЈвЦЃЌзДЬЌЭМгУРДЯдЪОвЛИіИјЖЈРрЁЂИјЖЈЪТМўЕФзДЬЌЁЃУПИізДЬЌЭМЖМгывЛИіРрЛђвЛИі Use Case ЯрЙиСЊЁЃзДЬЌЭМПЬЛШэМўЯЕЭГЕФааЮЊЪгЕуЃЌЫќЛљгкгаЧюзДЬЌздЖЏЛњЕФЭМЪОЛњжЦЁЃвЛИізДЬЌЭМАќРЈвЛИіРрдкЩњУќжмЦкФкЕФзДЬЌзЊЛЛКЭУшЪіЁЃЯогкЦЊЗљжЛИјГі CTS ЕФ CGdFeature РрЕФзДЬЌЭМЃЌШчЭМ 8 ЫљЪОЁЃ
ЭМ8 CGdFeatureРрзДЬЌЭМ
ЮФеТРДдДгкСьВтШэМўВтЪдЭј https://www.ltesting.net/
