








гУUMLНЈФЃПЊЗЂЧЖШыЪНШэМў[3] UMLФЃаЭ
ЙиМќзжЃКUMLНЈФЃ ЧЖШыЪНШэМў
ЁЁЁЁГігкПЩвЦжВадЕФПМТЧЃЌЫљгаРрБЛЗжГЩ3ИіВуДЮЃК
ЁЁЁЁзюЖЅВуЪЧЙІФмТпМРрЕФГщЯѓЃЌMachineSttingЮЊЛњЦїЩшжУРр;KeysЮЊАДМќРрЃЌDisplayrЮЊЯдЪОРрЃЌMotorControllerЮЊЕчЛњПижЦЦїРрЁЃетаЉТпМЩЯЕФРргыгВМўЮоЙиЃЌБугквдКѓгВМўаоИФЃЌЭЌЪБЪЙЕУПЊЗЂШЦЯпЛњЕФВЛЭЌАцБОБфЕУЗЧГЃШнвзЃЌШчДгЦНШЦЛњЕНПЊЗЂЛЗааЛњЃЌДгЖўжсШЦЯпЛњЕНПЊЗЂШ§жсШЦЯпЛњЁЃ
ЁЁЁЁжаМфВуЪЧЭтЮЇгВМўРрЕФГщЯѓЃЌFlashЮЊFlashДцДЂРрЃЌгУгкДцДЂЩшжУЕФВЮЪ§;SpeakerЮЊбяЩљЦїРр;PanelЮЊУцАхРр;DCMoto/ЮЊжБСїЕчЛњРр;StepMotorЮЊВННјЕчЛњРрЁЃ
ЁЁЁЁзюЕзВуЪЧЕЅЦЌЛњМАЦфФкВПЙІФмФЃПщРрЕФГщЯѓЃЌH8/3062ЮЊЕЅЦЌЛњРрЃЌгУгкЗтзАЪфШы/ЪфГіПк;Timer_KeyShakeЮЊАДМќЗРЖЖЖЈЪБЦї;Timer_DCMotorЮЊжБСїЕчЛњPWMТіГхВњЩњЖЈЪБЦї;Timer_DCCaptureЮЊжБСїЕчЛњШІЪ§ВЖЛёЖЈЪБЦї;Timer_StepMotorЮЊВННјЕчЛњPWMТіГхВњЩњЖЈЪБЦїЁЃЗжетвЛВуПЩвдЪЙЕУБфЛЛЕЅЦЌЛњРраЭЗЧГЃШнвзЃЌШ№ШјH8/300HЯЕСаЕЅЦЌЛњдкЙњФкгІгУЗЧГЃКБМћЃЌжЎЫљвдбЁгУетПюЪЧЮЊСЫгыЙњЭтВњЦЗЕФОКељЃЌетбљПЩвдИќПьЁЂИќКУЕиДђПЊЙњМЪЯњТЗЃЌЕЋдкбЁдёетПюЕЅЦЌЛњЕФЭЌЪБвбОзіКУСЫвЦжВЕНARMФкКЫЕЅЦЌЛњЕФзМБИЁЃ
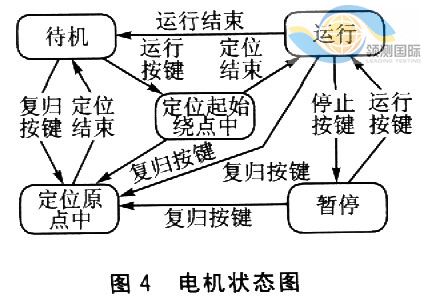
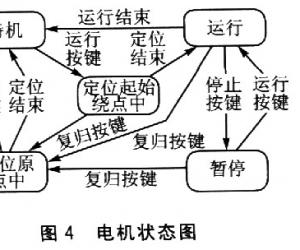
ЁЁЁЁЮЊСЫРэНтЯЕЭГЕФЖЏЬЌааЮЊЃЌЛЙгІИУгУЫГађЭМЁЂазїЭМЁЂзДЬЌЭМКЭЛюЖЏЭМЖдЯЕЭГЖЏЬЌааЮЊНјааУшЪіЁЃзДЬЌЭМЖдЧЖШыЪНЯЕЭГЕФЩшМЦгШЦфживЊЃЌетРягУЦфЖдMotorControllerЕФзДЬЌзЊЛЛНјааУшЪіЃЌШчЭМ4ЫљЪОЁЃ
ЁЁЁЁ
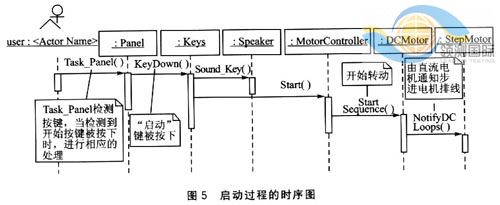
ЁЁЁЁПЩвдгУЪБађЭМЕШЖдгУР§НјааНјвЛВНЕФЗжЮіЃЌЁАЦєЖЏЁБАДМќАДЯТКѓДІРэЕФЪБађЭМШчЭМ5ЫљЪОЁЃ
ЁЁЁЁ
ЁЁЁЁНЈФЃЙ§ГЬВЛЪЧвЛИіжБЯпЙ§ГЬЁЃЫќЭљЭљЪЧвЛИібнЛЏЁЂЕќДњЕФЙ§ГЬЃЌВЛЖЯЕиЗжЮіЁЂЦРМлЁЂаоИФЁЂдйЗжЮіЃЌВХПЩФмЕУЕНвЛИіИпжЪСПЕФФЃаЭЃЌЮЊИпжЪСПЕФШэМўДђЯТЛљДЁЁЃ
ЁЁЁЁ1.3 БрТыЙ§ГЬ
ЁЁЁЁRoseОпгаздЖЏЩњГЩC++ПђМмДњТыЕФЙІФмЁЃдкRoseВЫЕЅжабЁдёToolsЁњANSI C++ЁњGenerate CodeЃЌПЩвдЩњГЩC++ЕФПђМмДњТыЁЃ
110593_200911090944361cBn6
110593_200911090944361cBn6
ЮФеТРДдДгкСьВтШэМўВтЪдЭј https://www.ltesting.net/
